Table des matières
Centipède
 Centipède est un réseau mutualisé de bases GNSS RTK, géré par des Instituts de recherche en Charente-Maritime. Il vise à fournir un signal de correction RTK libre et ouvert afin de disposer d'une précision centimétrique sur un territoire continu - by Julien Ancelin
Centipède est un réseau mutualisé de bases GNSS RTK, géré par des Instituts de recherche en Charente-Maritime. Il vise à fournir un signal de correction RTK libre et ouvert afin de disposer d'une précision centimétrique sur un territoire continu - by Julien Ancelin
tags: GNSS, RTK, GPS
La suite de cette page reprend des informations du projet Centipede mais principalement mes recherches et apprentissages de la géolocalisation de précision.
Étude d'une alternative Ublox NEO-M8T RTKLIB avec le Ublox NEO-M8T et RTKLIB / RTKLIB_Touchscreen_GUI.
Voir aussi rtklib.
- L'autoguidage du tracteur, le bon signal sur wikiagri.fr
Discussions: Cyrille sur Twitter
Usages
- pilotage autonome de drone, de tracteur agricole, …
- relevé de précision (agriculture, science, points d'intérêt)
Et pour OSM ?
- Mapillary avec de belles traces
- POI de référence (borne incendie, … )
- y-a-t'il un tag pour décrire la précision du relevé ? survey:precision n'existe pas …
Récepteur (Base ou "Rover")
Reach M+
 Reach M+ - RTK GNSS module for precise navigation and UAV mapping - $265.
Reach calculates real-time coordinates with centimeter accuracy and streams them in NMEA or binary format to your device over UART, Bluetooth or Wi-Fi. PPK for UAV mapping. Centimeter accuracy without GCP
Reach M+ - RTK GNSS module for precise navigation and UAV mapping - $265.
Reach calculates real-time coordinates with centimeter accuracy and streams them in NMEA or binary format to your device over UART, Bluetooth or Wi-Fi. PPK for UAV mapping. Centimeter accuracy without GCP
Le REACH fait récepteur GNSS, la transmission ou réception des “trames de correction”, calcul un signal corrigé pour l'envoyer au smartphone ou autre.
Ce module embarque un programme très complet avec une IHM Web. Le must 
Autres à évaluer
ublox ZED-F9P
Le RTK ublox ZED-F9P GNSS est bi-channel, c'est beaucoup mieux mais … ce chip est à 350 €.
U-blox NEO-M8P
U-blox M8P high precision GNSS modules, High precision GNSS performance for the mass market
- Integrated Real Time Kinematics (RTK) for fast time‑to‑market
- Smallest, lightest, and energy‑efficient RTK module
- Complete and versatile solution due to base and rover variants
- World‑leading GNSS positioning technology
- NEO-M8P-0: rover
- NEO-M8P-2: base and rover
Drotek Tiny RTK GNSS (M8P)

Drotek Tiny RTK GNSS (M8P) The world smallest RTK GPS based on u-blox NEO-M8P-2 (base or rover) - 190 €
U-blox NEO-M8T
UBLOX NEO-M8T TIME & RAW receiver board with SMA (RTK ready). 72-channel u-blox M8 engine GPS/QZSS L1 C/A, GLONASS L10F, BeiDou B1 SBAS L1 C/A: WAAS, EGNOS, MSAS Galileo-ready E1B/C
- Drotek Ublox NEO-M8T GPS + LIS3MDL Magnetometer with passive antena, UBX NMEA, ROW DATA - 80 €
- Drotek 3DR SOLO GPS (NEO-M8T) with passive antena, I2C, UBX NMEA - 80€
Navspark NS-RAW
Navspark NS-RAW, Carrier Phase Raw Measurement Output GPS Receiver - 70 €.
Antennes
À évaluer
Le Caster
Le “Caster” est le serveur recevant des flux DGPS (RTCM SC104 messages) de “NTRIP Server” (des bases) et distribuant ces flux aux “NTRIP Client” (les rovers).
Todo
Le documentation de BKG NtripCaster est une source des besoins de configurations et fonctionnalités.
- Streaming
- The second NTRIP Version 2.0 transport approach is based on both, the Internet Standard Protocol RTSP (Real Time Streaming Protocol) for stream control on top of TCP and the Internet Standard Protocol RTP (Real Time Transport Protocol) for data transport on top of connectionless UDP.
- Multi serveurs
- Diffusion croisée des trames entre les casters
Softwares
Je me focalise sur CasterREP en Gnu GPL v3 qui implémente les Servers et la Web GUI.
Une instance en ligne par les auteurs : http://rep-gnss.es/casterApoyo.php
Liste de softs :
- Older server by German Federal Agency for Cartography and Geodesy (BKG) ntripserver http://software.rtcm-ntrip.org
- La version récente bkgcaster est vendue 1000€
- Standard Ntrip Broadcaster (Ntrip protocol V1) https://github.com/nunojpg/ntripcaster
- http://www.rep-gnss.es/casterrep/ Gnu GPL v3
- mail de contact envoyé le 04 février 2019
- https://www.use-snip.com (lite edition)
D'autres softs (libres, non libres et payants) sont cités dans les pages:
Ntrip
Networked Transport of RTCM via Internet Protocol
C'est un protocole non proprietaire (libre / open) qui permet l'échange de corrections différentiel (DGPS, RTK) de position. Il a été défini par German Federal Agency for Cartography and Geodesy (BKG). La RTCM a implémentée 2 versions: NTRIP v1.0 and v2.0.
The Networked Transport of RTCM via Internet Protocol (NTRIP) is a protocol for streaming differential GPS (DGPS) data over the Internet in accordance with specification published by RTCM. NTRIP is a generic, stateless protocol based on the Hypertext Transfer Protocol HTTP/1.1 and is enhanced for GNSS data streams.
The NTRIP transmission technique is based on the popular Hypertext Transfer Protocol (HTTP) streaming standard (e.g., internet radio) and uses the client-server principle for transferring data. The server is known as the NTRIP broadcaster (a.k.a. NTRIP caster or simply caster). A caster creates the multiple- and simultaneous-user access to the corrections being transmitted by a single GNSS reference station. It also provides security (via username and password) and management of the connected clients, and it creates mountpoints (i.e., channels a user can connect to) to uniquely identify the different corrections being made available to clients.
Internet Port, from IANA, by RTCM
rtcm-sc104 2101 tcp rtcm-sc104 [Wolfgang_Rupprecht] rtcm-sc104 2101 udp rtcm-sc104 [Wolfgang_Rupprecht]
An NTRIP sourcetable describes the data a caster provides and consists of three types of records:
- CAS - caster specification records
- NET - network specification records
- STR - stream specification records
line.StartsWith(“STR”) → NTRIP.SourceTable.NTRIPDataStream
line.StartsWith(“CAS”) → NTRIP.SourceTable.NTRIPCaster
line.StartsWith(“NET”) → NTRIP.SourceTable.NTRIPNetwork
Softwares
NTRIP Server:
- Android app YCServer NTRIP server
Augmenter la précision
Le positionnement précis par GNSS nécessite la connaissance :
- Des orbites et des corrections d'horloge satellite précises ;
- Des paramètres d'orientation de la Terre ;
- Un système de référence précis.
Types de mesures possibles:
- mesure sur le code,
- mesure sur la phase de l'onde porteuse.
Erreurs à compenser:
- Erreurs liées aux satellites: éphémérides (orbites), centre de phase, horloge
- Erreurs liées à la propagation: traversée des couches de l'atmosphère. la troposphère 0 à 80 km impacté par météo, la ionosphère > 80 km impacté présence de charge libre.
- Erreurs de la station réceptrice: masque, trajet multiple, centre de phase, bruit de mesure, horloge
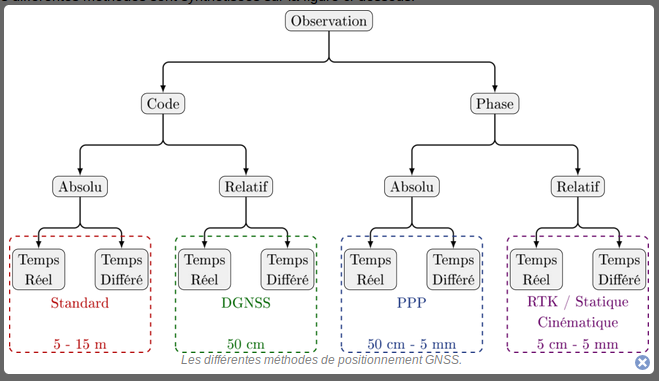
Méthodes de positionnement relatif ou différentiel:
- DGNSS : Differential GNSS, positionnement relatif sur le code en temps réel ou différé ; la précision est de l'ordre de 50 cm ;
- RTK : Real Time Kinematic, positionnement relatif sur la phase en temps réel ; la précision est de l'ordre de 5 cm ;
- PPP : Precise Point Positioning, positionnement absolu sur la phase en temps réel ou différé ; la précision est inférieure au centimètre en temps différé et supérieure à 10 cm en temps réel (mais avec des temps d'initialisation très importants).
Shéma de l'ENSG, extrait du cours Apprendre le positionnement par GNSS avec le logiciel RTKlib
Post-processing:
Sources de données
CORS https://corsmap.com/
Réseau GNSS Permanent (RGP) de l'IGN
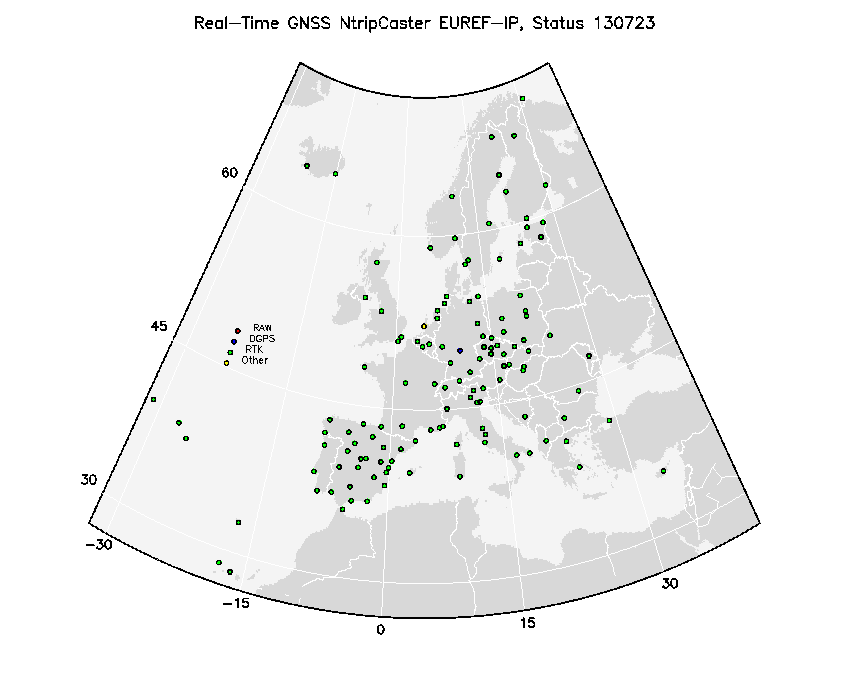
Royal Observatory of Belgium (ROB) provides EUREF Permanent GNSS Network http://epncb.oma.be/_networkdata/data_access/real_time/map.php - le serveur http://www.euref-ip.net, distribution map
Global List of Real-Time GNSS Data Streams From Ntrip Broadcasters https://igs.bkg.bund.de/root_ftp/NTRIP/streams/streamlist_world-wide.htm
http://ntrip.rep-gnss.es/herramientas.php
IGS-IP http://igs-ip.net – free worldwide NTRIP casters
http://www.sapos-ntrip.de:2101/
Les éphémérides des satellites:
- NASA GNSS Orbit Products
Marchands / Achats
Crédits
Projets:
- centipede : Julien Ancelin @complementterre
- divers: Stéphane Péneau @stfmani
Photos:
- centipede bases CT et LIENSS (.*_jancelin.jpg) : Julien Ancelin
- les photos produits ne sont pas stockées ici, mais téléchargées depuis le site de leur proprio ou exploitant respectif